Introduction
Electric actuators drive critical automation across industrial systems, from factory assembly lines to precision robotics. Their underwater variants—purpose-built to function submerged—are now essential to subsea robotics, ROV manipulation, submerged water infrastructure, and offshore pipeline control. The global underwater robotics market is projected to reach $13.02 billion by 2030, driven by demand for valve actuation, robotic joint control, and cleaning mechanisms in environments where manual intervention is unsafe.
Most technical guides explain electric actuator operation at a surface level, glossing over what makes underwater variants genuinely different: pressure compensation against crushing hydrostatic loads, self-contained electronics inside sealed housings, and multi-layer sealing protecting dynamic output shafts from seawater ingress.
Engineers specifying these systems often underestimate how fundamentally different a true subsea actuator is from a standard IP67-rated unit.
This guide breaks down exactly how underwater electric actuators work, from control signal reception to mechanical output delivery, and clarifies what distinguishes them from surface-rated devices.
TLDR
- Underwater electric actuators convert electrical control signals into precise mechanical motion—rotary or linear—while submerged under significant hydrostatic pressure
- Core operation mirrors standard actuators: motor converts electrical energy to rotational force, gearbox amplifies torque, output shaft drives the load — every stage is re-engineered for underwater conditions
- Pressure compensation equalizes internal and external pressure via oil-filled housings, preventing seal failure at depth
- Absolute encoders retain position data between power cycles—critical when manual reset underwater is impractical
- Self-contained electronics, sealed connectors, and corrosion-resistant materials separate underwater actuators from surface-rated counterparts
What Is an Underwater Electric Actuator?
An underwater electric actuator is a sealed, pressure-compensated electromechanical device that converts electrical energy into controlled mechanical motion (linear or rotary), designed to operate reliably in submerged environments at defined depth ratings.
These devices fall under API Standard 17F for Subsea Production Control Systems and ISO 13628-4 for subsea wellhead and tree equipment.
This is not simply a standard electric actuator with a waterproof coating. The internal architecture — from housing design and sealing systems to electronics integration and pressure management — is engineered specifically around the physics of operating under underwater pressure.
Two Primary Motion Outputs:
- Rotary actuators deliver torque and angular displacement for quarter-turn valves, manipulator arms, and ROV tooling
- Linear actuators provide push/pull force (stroke) for applications like choke valves, gripping mechanisms, and positioning systems
Both types share the same core adaptations: pressure compensation, subsea-grade sealing, corrosion-resistant materials, and self-contained control electronics. Understanding these adaptations is also what separates a true subsea actuator from a standard IP-rated device.
IP Ratings vs. True Subsea Qualification
Standard IP68 ratings indicate continuous immersion beyond 1 meter, but manufacturers specify their own depth and duration limits — and those limits are typically shallow. True subsea actuators are qualified to extreme depths (3,000m or 6,000m) through rigorous hyperbaric testing per API 17F and DNV standards.
How Does an Underwater Electric Actuator Work?
Underwater electric actuators operate through a defined sequence: signal reception, motor drive, gear amplification, pressure management, and position-controlled output—each stage adapted to function under hydrostatic load.
Initiation: Receiving the Control Signal
The actuator receives commands via a sealed subsea connector (wet-mate or dry-mate) carrying communication signals such as RS232, RS485, CAN bus, or analog 4-20mA. The signal is processed by an internal motor driver or controller housed within the pressure-rated enclosure.
Underwater actuators must handle command signals reliably across cable runs of tens or hundreds of meters, making signal integrity and noise rejection critical design requirements. RS422 (differential signaling) is often preferred over RS232 for longer underwater runs because its balanced line design rejects interference more effectively over distance. NV Mechanics' underwater actuators use RS422/RS232 serial communication at 19,200 baud with integrated control circuitry housed inside the sealed housing.
Core Operation: Motor Drive and Gear Amplification
The internal motor—typically a brushless DC (BLDC) or permanent magnet synchronous motor (PMSM)—converts electrical energy into rotational force. Brushless motors are mandatory for subsea designs because:
- No carbon brush wear
- No arcing risk inside oil-filled housings
- Lower maintenance burden in sealed environments where servicing is difficult or impossible
The gearbox—commonly a planetary or worm gear arrangement—steps down motor RPM while amplifying torque, producing the slow, high-force output needed to drive valve stems, robotic joints, or brush cleaning mechanisms with precision.
A valve control actuator on a submerged water reservoir gate requires very different torque output than one driving a lightweight inspection ROV joint. Gear ratio selection directly determines the speed-force trade-off. NV Mechanics' rotary actuator, for example, operates at a 238:1 gear ratio, delivering 27 Nm of continuous torque at 30 RPM—suitable for controlled subsea valve operation.

Pressure Compensation and Sealing
The Pressure Problem
As depth increases, hydrostatic pressure rises substantially. Without compensation, the pressure differential between seawater outside and air inside the housing would compress seals, allow water ingress, or deform the housing.
At 3,000 meters, actuators face crushing pressures of approximately 301 bar (4,373 psi). The "1 bar per 10 meters" rule is a close approximation, but actual pressures are slightly higher due to seawater density.
| Depth (meters) | Gauge Pressure (bar) | Gauge Pressure (psi) |
|---|---|---|
| 300 m | 30.15 bar | 437 psi |
| 1,000 m | 100.51 bar | 1,458 psi |
| 3,000 m | 301.55 bar | 4,374 psi |
Oil-Filled Pressure Compensation
Oil-filled housings address this by using a compliant volume—typically a rubber bladder or rolling diaphragm—that equalizes internal and external pressure passively as depth changes. The housing is filled with incompressible dielectric fluid, and the compliant device flexes to transmit external seawater pressure to the internal oil, preventing seal implosion.
NV Mechanics' 260cc oil compensators use a rolling diaphragm mechanism paired with a stainless steel or Inconel spring, maintaining 0.7 to 1 bar positive internal pressure across the full volume range. This positive differential prevents seawater from penetrating seals even at extreme depth.
Multi-Layer Shaft Seals
The rotating output shaft is the most mechanically vulnerable point for water ingress. Multi-layer shaft seals—combinations of lip seals, O-rings, and labyrinth seals—protect this critical interface while permitting the mechanical rotation or linear motion that does the actual work.
Output and Position Control
The actuator produces controlled rotary or linear displacement that drives the attached load—a valve, robotic joint, or cleaning mechanism. The output is not just open/closed but can be precisely positioned anywhere within its travel range.
Absolute vs. Incremental Encoders
Absolute encoders outperform incremental encoders in subsea motion control for a concrete reason: incremental encoders only track relative movement and lose position data when power is cycled, requiring a "homing" routine upon restart. Absolute encoders assign a unique digital code to every position, so if power is lost, the encoder retains exact position and reports it immediately upon restoration—eliminating uncalibrated homing movements in critical subsea infrastructure.
NV Mechanics' actuators feature a 30-bit absolute encoder (14-bit single-turn counter + 16-bit multi-turn counter) providing 0.1-degree angular resolution at the output shaft, with position retained between power cycles.
What Makes Underwater Electric Actuators Different from Standard Ones?
Pressure Compensation System
Standard electric actuators are designed for atmospheric conditions and require no internal pressure management. Underwater units must actively neutralize hydrostatic pressure using oil-filled bladder or piston compensators.
Sealing and Ingress Protection Standards
Standard actuators may carry IP65 or IP67 ratings adequate for splash or temporary immersion. Subsea actuators require IP68 or full subsea-grade sealing with redundant seal layers, particularly around the output shaft where dynamic movement constantly challenges static seals.
Material Selection for Corrosion Resistance
Standard actuators typically use steel or standard aluminum alloys. Underwater units operating in freshwater, brackish, or marine environments require:
- Titanium (Grades 2 and 5): Near-immunity to seawater corrosion and pitting
- Super Duplex Stainless Steel: PREN (Pitting Resistance Equivalent Number) > 40 required for permanent subsea installations to resist localized chloride attacks
- Anodized Aluminum: Used for lightweight ROV tooling but typically restricted to temporary deployments due to eventual pitting risks
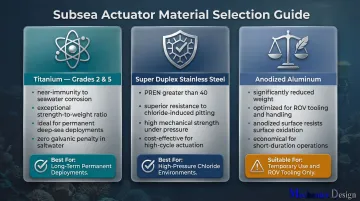
NV Mechanics manufactures actuators in SST 316 stainless steel or titanium construction for extended subsea deployment.
Self-Contained Electronics Architecture
Surface actuators can rely on external control panels or enclosures. Subsea units must house all circuitry — motor drivers, encoders, communication interfaces, and protection electronics — inside the sealed pressure housing. There is no practical option for external components at depth.
NV Mechanics' underwater actuators integrate all control circuitry, RS422/RS232 communication, and a 30-bit absolute encoder inside the housing, with pressure compensation rated to 3,000m. Position data is retained between power cycles, which matters in remote subsea deployments where manual resets are not possible.
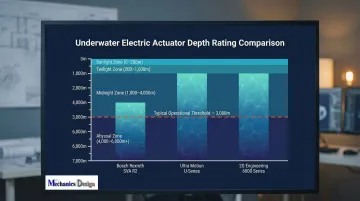
Depth Rating as a Design Specification
Underwater actuators are rated to specific operating depths — 300m, 1,000m, 3,000m, 6,000m — and that rating defines the continuous working pressure the housing, seals, and compensation system are engineered to sustain. It is not a single burst-pressure figure but a continuous operational specification.
Commercial off-the-shelf electric actuators are now capable of reaching the deepest operational oil and gas fields:
| Manufacturer | Product Model | Stated Depth Rating |
|---|---|---|
| Bosch Rexroth | SVA R2 Subsea Valve Actuator | 4,000 meters |
| Ultra Motion | U-Series Subsea Actuator | 6,000 meters |
| 2G Engineering | 6000 Series Subsea Actuator | 6,000 meters |
Where Underwater Electric Actuators Are Used
Subsea ROVs and Underwater Robotic Systems
Underwater actuators drive manipulation arms, valve operation, camera positioning, and cleaning mechanisms for inspection and maintenance of underwater infrastructure including pipelines, ship hulls, dams, and submerged water storage tanks.
Submerged Water Infrastructure
Underwater actuators enable valve and gate control in submerged municipal water reservoirs and industrial cooling tanks without draining the tank or deploying divers. Robotic systems built around these actuators — such as those developed by NV Mechanics for potable and wastewater tank inspection and cleaning — keep critical water infrastructure online during maintenance operations, eliminating hazardous confined-space entry.
According to the U.S. Bureau of Labor Statistics, 1,030 workers died from occupational injuries involving confined spaces between 2011 and 2018. That risk disappears when inspection and cleaning are handled remotely.

Deploying ROVs with underwater electric actuators for on-stream tank inspections allows facilities to maintain API 653 compliance without draining the tank — saving hundreds of thousands of dollars per asset and eliminating fatal confined-space entry risks entirely.
Broader Industrial and Offshore Applications
- Subsea Oil & Gas: Christmas tree valve control and umbilical-connected systems
- Tidal and Marine Energy: Blade pitch control on tidal turbines to optimize power capture from ocean currents
- Oceanographic Research: Automated sediment sampling and robotic manipulation on deep-sea research platforms
Conclusion
Underwater electric actuators follow the same foundational principle as any electric actuator: a control signal drives a motor, a gearbox amplifies torque, and the output shaft does mechanical work. What sets subsea units apart is that every element — from housing to encoder — is purpose-engineered to function under hydrostatic pressure, in sealed environments, without external maintenance access.
Engineers and facility managers who understand these systems are better positioned to specify the right unit for their application. The key factors to get right:
- Pressure compensation — ensures internal pressure equalizes with ambient depth
- Sealing architecture — prevents water ingress at connectors, shafts, and housings
- Depth rating — confirms the actuator is qualified for the target operating depth
- Absolute position feedback — retains position data across power cycles without rehoming
Getting these specifications right at the selection stage avoids the far more costly problem of actuator failure at depth.
Frequently Asked Questions
What is the working principle of an electric actuator?
An electric actuator converts electrical energy into mechanical motion by using a motor to generate rotational force, which a gearbox amplifies and translates into linear or rotary output to drive a valve, joint, or mechanism. Control signals direct the motor's operation, and position feedback ensures accurate output.
How do underwater electric actuators handle water pressure?
Underwater actuators use pressure compensation—typically oil-filled housings with a compliant bladder or piston—to equalize internal and external pressure, preventing seal failure or housing deformation as depth increases. This passive system maintains a slight positive internal pressure differential across the full depth range.
What is pressure compensation in an underwater actuator?
Pressure compensation is the design strategy that allows an actuator's internal environment to track ambient water pressure rather than resist it. Without it, increasing depth would create a pressure differential large enough to collapse seals, deform housings, or force water ingress—making it a non-negotiable feature for any depth-rated actuator.
How deep can underwater electric actuators operate?
Commercial underwater actuators are commonly rated to 3,000m–6,000m operational depths. Units specifically engineered for subsea use—such as the Bosch Rexroth SVA R2—can reach 4,000m, while others like the Ultra Motion U-Series are rated to 6,000m (20,000 ft).
What communication protocols do underwater electric actuators use?
Common protocols include RS232, RS485, and CAN bus (particularly CANopen via SIIS Level 2 profile), transmitted through sealed wet-mate or dry-mate subsea connectors. RS422/RS485 is preferred for long cable runs due to superior noise immunity.
How is an underwater electric actuator different from a standard electric actuator?
Three key differences set subsea units apart from standard actuators:
- Pressure compensation: oil-filled housings with compliant volumes to neutralize depth pressure
- Subsea-grade materials: titanium or super duplex stainless steel (PREN > 40) for corrosion resistance
- Self-contained electronics: all control circuitry housed internally, versus standard actuators that rely on external components and assume atmospheric conditions