
Introduction
Underwater environments impose extreme physical constraints—pressure, corrosion, water ingress, and zero tolerance for fluid contamination—that make actuator selection one of the most consequential engineering decisions in subsea robotics design. At 1,000 meters depth, hydrostatic pressure reaches 1,450 PSI; at 3,000 meters, it exceeds 4,350 PSI. These crushing forces demand actuators engineered differently from their surface counterparts.
This article compares hydraulic, pneumatic, and electric actuator technologies across key performance metrics, and explains why pressure-compensated electric designs are gaining ground. Specific focus goes to the advancements—absolute encoders, integrated control circuitry, and self-compensating housings—that now let robots operate reliably at depths once reserved for the most complex hydraulic systems.
TLDR
- Hydraulic actuators deliver the highest force but risk contaminating sensitive environments like potable water tanks
- Pneumatic actuators fail below shallow depths due to air compressibility under hydrostatic pressure
- Pressure-compensated electric actuators are now the preferred choice for precision underwater robotics, offering precise control and rated depth performance from 3,000m to 6,000m
- Absolute encoders on output shafts retain position through power cycles, eliminating dangerous re-homing sequences
- Self-compensating housings with integrated circuitry reduce external cable penetrations and failure points
Why Underwater Actuators Demand a Different Engineering Approach
Hydrostatic Pressure: The Defining Constraint
Hydrostatic pressure increases approximately 1 atmosphere (14.7 PSI) for every 10 meters of depth. At 100 meters, actuators face 145 PSI; at 3,000 meters, over 4,350 PSI. Unlike surface robotics where pressure remains constant, underwater actuators must withstand external forces attempting to collapse housings, breach seals, and compress internal components.
Uncompensated designs pay for this in the most direct way: catastrophic seal failure, water ingress into motor windings, and short-circuited control electronics.
Sealing and Waterproofing Requirements
Ingress protection ratings define how well housings exclude water. IP68-rated enclosures withstand continuous immersion, but depth and duration matter. An actuator rated IP68 for 1 meter may fail catastrophically at 100 meters.
Static sealing—sealing a non-moving joint—is straightforward using O-rings and gaskets. Dynamic sealing—sealing a rotating or translating actuator shaft—is far more challenging. Dynamic seals must:
- Allow shaft motion without binding
- Maintain contact pressure across the entire stroke
- Resist wear from repetitive cycling
- Tolerate contamination from external sediment
Seal failure is the most common failure mode in underwater actuators. Even microscopic seal degradation allows water ingress, leading to motor corrosion, encoder damage, and electrical failure.
Corrosion and Material Selection
Freshwater environments are less aggressive than saltwater, but both demand corrosion-resistant materials:
- Anodized aluminum: Lightweight, adequate for freshwater and shallow saltwater
- Marine-grade stainless steel (316 SST): Superior corrosion resistance for deep saltwater applications
- Titanium: Premium material for extreme-depth and long-term deployments
- Engineered polymers (Delrin, PEEK): Chemical resistance and low friction for seal components
Potable water tanks add constraints around material safety—actuators must not leach harmful substances into drinking water. This rules out certain alloys and requires food-safe lubricants and dielectric oils.
Thermal Management in Sealed Housings
Unlike air-cooled surface actuators that rely on convection, underwater actuators dissipate heat through conduction into the housing and surrounding water. Sealed housings trap heat from motor windings and driver electronics — and without adequate thermal pathways, that heat accumulates until insulation degrades or the electronics shut down.
This directly affects continuous-duty ratings. An actuator rated for 100% duty cycle in air may handle only 50% duty underwater due to restricted cooling. Integrated electronics must be designed for confined thermal environments, often requiring heat-sinking directly to the actuator housing.
Control and Communication Constraints at Depth
External wiring penetrations are vulnerability points. Every cable entry requires a sealed bulkhead connector—another potential leak path. Traditional architectures separate motor drivers, encoders, and control circuitry from the actuator, requiring multiple cable bundles and penetrations.
Modern designs integrate drivers, encoders, and communication circuitry inside the sealed actuator housing. This approach offers three concrete advantages:
- Reduces external penetrations to a single power and communication cable
- Eliminates multi-bundle wiring runs prone to chafe and seal fatigue
- Simplifies deployment and cuts the number of potential leak paths
NV Mechanics Design Ltd.'s self-compensated actuators, for example, integrate all control circuitry within the housing, requiring only an RS232 serial connection.
Comparing the Main Actuator Technologies for Underwater Use
Hydraulic Actuators
Hydraulic actuators remain the traditional choice for high-force underwater applications—offshore manipulators, subsea drilling, and heavy ROV tooling. Their advantages include:
- High force density: Hydraulic cylinders generate enormous force in compact packages
- Pressure resistance: Hydraulic systems operate at 3,000+ PSI internally, making them inherently tolerant of external hydrostatic pressure
- Power transmission over distance: Hydraulic lines can route power to remote actuators without voltage drop
Key disadvantages:
- Hydraulic fluid leak risk: Even small leaks contaminate the surrounding environment
- Environmental concerns: Critical in potable water tanks and ecologically sensitive areas
- System complexity: Requires pumps, reservoirs, valves, and plumbing
- Maintenance burden: Regular seal replacement and fluid conditioning
In potable water applications, contamination risk disqualifies hydraulic actuators entirely.
Pneumatic Actuators
Pneumatic actuators are largely unsuitable for underwater applications beyond very shallow depths. Air is compressible, and pneumatic actuator force output degrades significantly under hydrostatic back-pressure. At 10 meters depth, ambient pressure doubles; at 30 meters, it quadruples. A pneumatic actuator rated for 100 PSI output at the surface delivers negligible force at 30 meters.
Limited exceptions exist for surface-adjacent or shallow-water soft robotics, where pneumatic compliance aids gentle manipulation. These remain niche use cases outside mainstream underwater robotics.
Electric Actuators
For precision underwater robotics, brushless DC servo motors driving ball screws (linear) or gear reducers (rotary) have driven rapid adoption of electric actuator technology. Advantages include:
- Clean operation: No risk of fluid contamination
- Precise closed-loop control: Position, velocity, and torque control via encoder feedback
- Quiet operation: Critical for scientific and inspection missions
- Digital communication protocols: RS232, RS422, and CAN bus integration
Two core engineering challenges limit uncompensated electric designs at depth: heat dissipation inside sealed housings, and pressure differential across seals that causes seal failure as depth increases.
Pressure-Compensated Electric Actuators
Pressure compensation solves the seal failure problem by equalizing internal and external pressure. The actuator housing is filled with dielectric oil, which transmits pressure without conducting electricity. As the robot descends and ambient pressure increases, the oil compresses slightly, maintaining near-zero pressure differential across the seals.
This design brings electric actuators into depth territory previously exclusive to hydraulic systems. NV Mechanics Design Ltd. manufactures pressure-compensated electric actuators rated to 3,000 meters (self-compensated models) and 6,000 meters (high-capacity linear actuators). Both use Panolin or Telus 22 dielectric oils with rolling diaphragm compensators, maintaining 0.7 to 1 bar positive internal pressure.
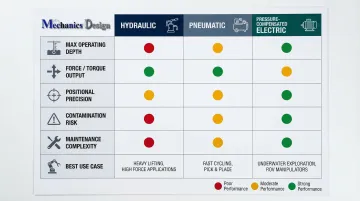
Side-by-Side Comparison
| Feature | Hydraulic | Pneumatic | Pressure-Compensated Electric |
|---|---|---|---|
| Max Operating Depth | 6,000+ meters | <10 meters | 3,000–6,000 meters |
| Force/Torque Output | Very High | Low (degrades with depth) | Moderate to High |
| Positional Precision | Moderate | Low | High (0.1° for rotary) |
| Contamination Risk | High (fluid leaks) | None | None |
| Maintenance Complexity | High | Low | Low to Moderate |
| Best Use Case | Heavy subsea manipulation | Shallow soft robotics | Precision inspection and cleaning |
Key Advancements Defining the Next Generation of Underwater Actuators
Absolute Encoders Mounted on Output Shafts
Incremental encoders track position by counting pulses relative to a starting reference. If power is lost, they lose position information and require a homing sequence to reestablish the reference point. In underwater robotics, homing may be unsafe or impossible—imagine a manipulator arm inside a water tank suddenly sweeping to find its home position after a power interruption.
Absolute encoders immediately report exact position on power-up, even if the actuator moved during the outage. They use coded patterns across the encoder scale, allowing the readhead to determine position without motion.
Placement on the output shaft (rather than the motor shaft before gearing) provides true load-side position feedback. Motor-mounted encoders cannot detect backlash, gear wear, or mechanical deflection between the motor and final output. Output-shaft encoders close the control loop around the gearing, ensuring the controller knows the actual load position.
According to Renishaw, absolute encoders retain position through power cycles, while incremental encoders lose position and require re-homing. For subsea manipulators recovering from power faults, this difference is safety-critical.
NV Mechanics Design Ltd.'s actuators integrate a 30-bit absolute encoder (14-bit single-turn + 16-bit turns counter) mounted on the output shaft, delivering 0.1-degree positional precision with position retention between power cycles.
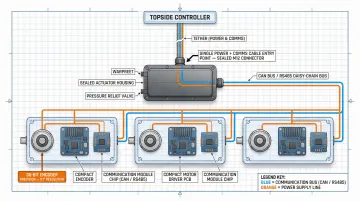
Self-Compensating Actuator Designs with Integrated Circuitry
Traditional underwater actuator architectures separate motor drivers, encoders, and communication modules from the actuator itself. Each separated component requires its own cable run and bulkhead penetration—each one a potential leak path.
Self-compensating designs integrate all circuitry inside the sealed housing:
- Motor driver electronics
- Absolute encoder mounted on the output shaft
- Communication module (RS422, RS485, CAN bus)
- Pressure compensation system
This consolidation reduces external penetrations to a single power and communication cable. Fewer penetrations mean fewer failure points, simpler integration, and reduced system complexity.
NV Mechanics Design Ltd.'s self-compensated actuators exemplify this approach, embedding logic, driver circuitry, and RS422 serial communication at 19,200 baud entirely within the housing.
Emerging Soft and Compliant Actuator Research
While integrated rigid actuators dominate current deployments, researchers are exploring HASEL (Hydraulically Amplified Self-healing Electrostatic) actuators and dielectric elastomer actuators (DEAs) for gentle underwater manipulation. These technologies offer a different set of trade-offs:
- Conform to irregular shapes without rigid frames
- Operate silently with no motors or gears
- Produce no fluid contamination through electrically driven deformation
Current limitations include high voltage requirements (kilovolts), lower force output than rigid actuators, and challenges achieving deep depth ratings. HASEL and DEA research remains largely in the laboratory phase for underwater applications.
Improvements in Depth Rating and Pressure Tolerance
Leading commercial electric actuators now reach 6,000 meters depth—covering the full range of offshore oil and gas operations. Engineering methods driving these improvements include:
- Increased housing wall thickness: Thicker titanium or stainless steel housings resist collapse
- Advanced seal geometry: Multi-lip seals with energizing springs maintain contact pressure
- Oil volume compensation: Rolling diaphragm or bladder systems accommodate oil compression and thermal expansion

NV Mechanics Design Ltd.'s pressure-compensated actuators are rated to 3,000–6,000m, covering the majority of subsea inspection and industrial cleaning applications.
Advances in Digital Communication Integration
Modern underwater actuators embed RS232, RS422, RS485, and CAN bus protocols alongside motor drivers and encoder feedback inside sealed housings. This enables:
- Simpler multi-axis robot architectures: Daisy-chain multiple actuators on a single communication bus
- Reduced topside electronics: Controllers remain compact; intelligence resides in actuators
- Rich telemetry: Actuators report position, velocity, current, voltage, temperature, and fault conditions
CAN bus (CANopen) has become standard in maritime electronics, allowing unified control across subsea systems.
How to Choose the Right Actuator for Your Underwater Robotic System
Key Selection Criteria
Evaluate actuators based on:
- Operating depth (with safety margin): Always specify a depth rating 20-30% beyond maximum planned depth
- Continuous force and torque requirements: Account for sustained loads, not just peak force
- Positional accuracy needs: Precision manipulation demands absolute encoders and output-shaft feedback
- Operating environment: Potable water, seawater, or industrial cooling water each impose constraints
- Available power budget: High-force hydraulic systems require large pumps; electric actuators demand high-capacity batteries or tethered power
- Maintenance access frequency: Deep-sea deployments demand ultra-reliable designs; shallow systems tolerate more frequent service
The most demanding combination — high force at extreme depth with infrequent maintenance access — narrows your options quickly and drives cost upward accordingly.
Inspection vs. Active Cleaning/Manipulation Tasks
Inspection robots benefit from quiet, precise operation that avoids disturbing the surrounding environment:
- Electric actuators with absolute encoders
- Quiet brushless motors
- Clean operation (no hydraulic fluid)
Cleaning and manipulation robots must deliver sustained torque under continuous load, which means selecting for:
- Actuators rated for continuous duty with adequate thermal margins
- High torque at low speeds (for scrubbing and tooling)
- Robust sealing against debris and sediment
In potable water tanks, hydraulic actuators are eliminated due to contamination risk, making pressure-compensated electric actuators the practical default. NV Mechanics Design Ltd.'s actuators, rated to 3,000m water depth, are built specifically for these environments — delivering clean operation across potable water, seawater, and industrial cooling applications.
Importance of Encoder Resolution and Control Architecture
Once you've matched an actuator to your force and environment requirements, control architecture becomes the next decision point. Absolute position feedback and integrated closed-loop control are safety-critical for unmanned underwater systems — without them, a power interruption leaves the robot unable to determine actuator position, creating real hazards during recovery.
Multi-axis robots benefit from actuators that communicate via standardized protocols (CAN, RS485), enabling centralized control and diagnostic monitoring. High encoder resolution also matters: 30-bit absolute encoders provide 0.1-degree precision, which ensures repeatable positioning for sensor placement and tooling tasks across power cycles.
Real-World Applications: From Water Tank Cleaning to Deep-Sea Operations
Underwater Inspection and Cleaning in Water Infrastructure
Municipal and industrial water storage tanks, reservoirs, and cooling towers require periodic cleaning and inspection. Historically, this meant draining tanks (wasting water and causing downtime) or sending divers into confined spaces (high risk).
Remotely operated robots equipped with pressure-compensated actuators enable these tasks with the tank online and operational. The robots navigate interiors, scrub sediment, and inspect structural integrity — eliminating diver risk and avoiding costly downtime. NV Mechanics Design Ltd. focuses specifically on this application, building inspection and cleaning systems for potable water tanks where hydraulic contamination is unacceptable.
Pipeline, Hull, and Subsea Structure Inspection
Offshore oil and gas infrastructure, ship hulls, and underwater pipelines demand robust actuators for:
- High torque for brushing or tooling: Removing marine growth requires sustained force
- Precise positioning for sensor placement: Ultrasonic thickness gauges and cameras need exact alignment
- Reliability over extended deployments: Maintenance access is limited or impossible
These demands scale sharply at greater depths, where contamination risks and pressure extremes make electric actuation the only practical choice.
Deep-Sea Research and Scientific ROV Applications
At depths exceeding 1,000 meters, pressure-compensated electric actuators are the standard for scientific ROVs and AUVs. Research submersibles exploring hydrothermal vents, deep-sea biology, and geological formations rely on actuators rated to 3,000–6,000 meters.
These systems enable sample collection, sensor deployment, and high-precision maneuvering in environments where a hydraulic leak would contaminate samples or destroy sensitive instrumentation entirely.
Frequently Asked Questions
What types of actuators are most commonly used in underwater robotics?
Hydraulic actuators dominate high-force applications like offshore drilling and heavy manipulation, while pneumatic systems are limited to shallow or surface-adjacent tasks. Pressure-compensated electric actuators have become the standard for inspection, cleaning, and scientific work — valued for clean operation, precise controllability, and scalable depth ratings.
What is a pressure-compensated actuator and why does it matter for underwater use?
Pressure compensation equalizes internal and external pressure by filling the actuator housing with dielectric oil. This eliminates the pressure differential that would otherwise force water past seals, preventing failure at depth and enabling reliable electric actuation in deep-water conditions.
How does operating depth affect actuator selection?
Deeper depths require stronger housings, better sealing, and pressure compensation. Always specify actuators rated 20–30% deeper than your maximum planned operating depth. Shallow-water actuators fail catastrophically if deployed beyond their rated limit.
Why are hydraulic actuators avoided in potable water tank applications?
Hydraulic fluid leaks pose direct contamination risk to drinking water. Even trace amounts of hydraulic oil render water unsafe for consumption. Electric actuators eliminate this risk entirely, making them the only viable technology for robots operating inside potable water storage tanks.
What is an absolute encoder and why is it important for underwater actuators?
Absolute encoders retain exact position information between power cycles, reporting position immediately on restart even if the actuator moved during a power outage. This eliminates the need for re-homing sequences — a critical safety advantage in confined underwater environments.
What are the latest advancements in underwater actuator technology?
Recent advancements span several areas:
- Integrated electronics (drivers, encoders, communication modules) housed inside sealed actuator bodies
- Depth ratings reaching up to 6,000m
- Absolute encoders mounted on output shafts for true load-side position feedback
- Self-compensating oil-filled designs requiring no external compensator
- Early-stage research into HASEL and dielectric elastomer actuators for compliant manipulation


