
Introduction
Specifying motion systems for underwater environments demands more than standard engineering judgment. Hydrostatic pressure, corrosion, contamination risk, and remote operability all introduce failure modes that simply don't exist on land.
A single specification error carries real costs: hydraulic fluid contaminating potable water reservoirs, premature seal failure under pressure, or costly emergency retrieval operations at depths where human intervention isn't feasible.
The stakes extend beyond performance. Wrong technology choices can trigger environmental regulatory violations, worker safety incidents, and system downtime measured in days or weeks.
This guide compares electric underwater linear actuators and hydraulic cylinders across the criteria that matter most — pressure tolerance, contamination risk, maintenance requirements, and total cost — so engineers working in municipal water infrastructure, ROV platforms, and submerged industrial systems can specify with confidence.
TL;DR
- Electric linear actuators use motor-driven screws in oil-filled, pressure-compensated housings; hydraulic cylinders push a piston with pressurized fluid
- Hydraulic seal failures release fluid directly into surrounding water — a serious contamination risk in any submerged application
- Electric actuators integrate with digital control systems, support encoders, and require significantly less ongoing maintenance
- For potable water tanks, ROVs, and environmentally sensitive sites, electric actuators are the safer, more practical choice
- Hydraulic cylinders make sense only when force demands genuinely exceed what electric alternatives can deliver — and contamination risk is acceptable
Underwater Linear Actuator vs. Hydraulic Cylinder: Quick Comparison
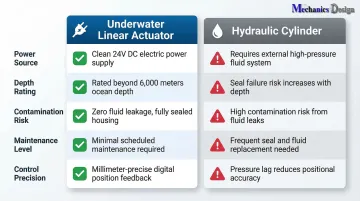
The table below maps each system across the five dimensions that matter most for subsea deployments. Detailed breakdowns follow.
| Dimension | Underwater Linear Actuator | Hydraulic Cylinder |
|---|---|---|
| Power source | Electric motor + lead/ball screw | Pressurized hydraulic fluid via HPU |
| Depth rating | Up to 3,000–6,000m (pressure-compensated) | Depth-limited by hose runs and seal complexity |
| Contamination risk | Zero — fully sealed, no hydraulic fluid | High — any seal failure releases fluid |
| Maintenance | Low — no fluid changes, sealed internals | High — seals, fluid, filters, hose inspections |
| Control precision | Digital protocols, sub-millimeter positioning | Limited by fluid dynamics; servo components add cost |
Power Source and Mechanism
Underwater linear actuator: An electric motor drives a lead screw or ball screw inside a sealed, pressure-compensated housing. The motor converts electrical energy into rotational motion, which the screw mechanism transforms into precise linear extension or retraction. All control electronics, encoders, and drivers are integrated within the sealed housing.
Hydraulic cylinder: Pressurized hydraulic fluid acts on a piston inside a cylinder to produce linear motion. The system requires a hydraulic power unit (HPU)—including pump, reservoir, heat exchanger, and valves—typically located topside or in a separate pressure-resistant enclosure, connected to the underwater cylinder via high-pressure hoses.
Depth and Pressure Compatibility
Underwater linear actuator: Engineered with pressure-compensation technology—typically oil-filled housings that equalize internal and external pressure. Quality units are rated to significant depths; for example, NV Mechanics' actuators are rated to 3,000m to 6,000m, depending on the model. This pressure-balancing approach prevents housing collapse and seal failure at depth.
Hydraulic cylinder: Can be deployed underwater but requires pressure-balanced designs and specialized underwater-grade seals. System complexity compounds significantly with depth due to the need for surface-to-depth hose runs, pressure management across the HPU system, and the risk of hose failure under extreme pressure differentials.
Contamination Risk
For potable water tanks and environmentally sensitive reservoirs, contamination risk is often the deciding factor.
- Underwater linear actuator: Fully sealed with no hydraulic fluid — zero contamination risk. Meets strict environmental discharge regulations (including EPA NPDES standards and equivalent Canadian requirements) without additional containment measures.
- Hydraulic cylinder: Any seal failure releases hydraulic fluid directly into the water. In potable water systems, this triggers immediate regulatory violations and public health hazards. Even biodegradable fluids require containment and cleanup.
Maintenance and Serviceability
Maintenance requirements diverge sharply between the two systems:
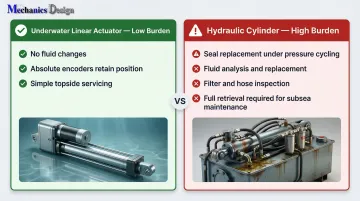
Underwater linear actuator — low burden:
- Sealed internals require no fluid changes
- Absolute encoders retain position data between power cycles
- Topside servicing is straightforward with no fluid systems to drain or refill
Hydraulic cylinder — high burden:
- Seals wear under pressure cycling and must be replaced
- Hydraulic fluid requires regular analysis and replacement
- Filters, hose connections, and fittings need routine inspection
- Subsea maintenance is rarely feasible — full system retrieval is usually required
Control and Integration
Underwater linear actuator: Integrates natively with digital communication protocols (RS232, RS422, RS485) and precision feedback devices. Absolute encoders provide repeatable positioning to within microns. Programmable motion profiles, remote operation, and automated control loops are standard capabilities.
Hydraulic cylinder: Control precision is limited by fluid dynamics and valve response characteristics. Achieving programmable positioning requires adding servo-hydraulic components—proportional valves, closed-loop controllers, and external position sensors—significantly increasing system cost and complexity.
What Is an Underwater Linear Actuator?
An underwater linear actuator is an electric linear actuator specifically engineered for submerged operation. Unlike standard industrial actuators, these units feature sealed, pressure-compensated housings (typically oil-filled) that allow the internal mechanism to operate at extreme depths without water ingress or structural failure from external pressure.
The core operating mechanism is straightforward: an electric motor (usually brushless for reliability) drives a lead screw or ball screw assembly, converting rotational motion into precise linear extension or retraction. The entire assembly is enclosed in a corrosion-resistant, depth-rated housing constructed from materials such as SST 316 stainless steel or titanium.
Key Design Features for Underwater Use
Pressure compensation is achieved through oil filling. The housing is filled with dielectric or food-grade oil that transmits external water pressure to internal components without allowing seawater contact. External compensators with rolling diaphragms maintain slight positive internal pressure (typically 0.7 to 1 bar), preventing water ingress at seals.
High-grade seals prevent water intrusion at the output shaft and connector points. These seals are designed for thousands of pressure cycles and long-term submersion in saltwater or freshwater environments.
Integrated position feedback via 30-bit absolute encoders mounted on the output shaft retains position data even after power cycles, eliminating the need for re-homing sequences after power loss.
Remote operability via RS232, RS422, or digital communication protocols enables control from surface vessels or ROV control systems. With integrated drivers and encoders inside the housing, no external electronics are exposed to water.
NV Mechanics Design units are rated to 3,000m to 6,000m depth, making them viable for deep-sea research, offshore infrastructure, and municipal water storage applications.
Use Cases of Underwater Linear Actuators
These actuators serve a range of demanding underwater applications:
Underwater tank inspection and cleaning robots operate inside potable water reservoirs or wastewater tanks without draining. According to industry data, ROV inspections reduce facility downtime by up to 80% compared to traditional manual draining and diver entry methods. Municipalities avoid the cost of draining thousands of gallons of treated water and bypass strict EPA dechlorination requirements for chlorinated discharge.
Remotely operated vehicles (ROVs) use electric linear actuators for manipulator arms, camera positioning, and tool actuation. Precision control and digital integration enable repeatable inspection procedures and automated data collection.
Valve and gate actuation in submerged pipelines, water treatment systems, and offshore facilities benefits from contamination-free operation and low maintenance — particularly in potable water environments where hydraulic fluid leaks are unacceptable.
What Is a Hydraulic Cylinder in Underwater Applications?
A hydraulic cylinder converts pressurized hydraulic fluid into linear force via a piston moving inside a cylindrical chamber. Adapting one for underwater use requires significant engineering: pressure-balanced housings to prevent crushing, specialized underwater-grade seals rated for high-pressure water exposure, and a hydraulic power unit (HPU) that typically remains topside or in a pressure-resistant enclosure.
The HPU—comprising pump, reservoir, valves, heat exchanger, and filtration system—must be connected to the underwater cylinder via high-pressure hoses running from surface to depth. These hose runs introduce significant efficiency losses, multiple potential failure points, and complex routing challenges in dynamic subsea environments.
Core Limitations in Submerged Environments
Operating hydraulic cylinders underwater introduces compounding risks:
- HPU overhead: Dedicated power, cooling, fluid monitoring, and maintenance infrastructure all add topside complexity and cost
- Efficiency losses: Hose runs from surface to depth bleed pressure and create multiple failure points along the line
- Single-point failure risk: One hose rupture can render the entire system inoperative
- Fluid contamination: Any seal failure discharges hydraulic fluid directly into the surrounding water
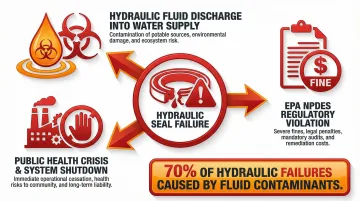
In potable water tanks, wastewater facilities, or freshwater reservoirs, a seal failure is more than a mechanical problem. The EPA's NPDES program strictly regulates pollutant discharges, and violations can result in legal action, monetary fines, and forced shutdowns.
These risks make hydraulic cylinders a poor fit for municipal water applications — but there are environments where they still make sense.
Where Hydraulic Cylinders Still Make Sense Underwater
Hydraulic cylinders hold a clear edge in very high-force applications: heavy offshore lifting equipment, large subsea gate valves on oil and gas infrastructure, and construction tasks requiring multi-tonne force output where no electric alternative currently matches the force density.
In these scenarios—typically offshore oil and gas operations—the HPU integration is already part of the system design, environmental regulations differ from municipal water applications, and the added complexity is justified by the extreme force requirements.
Underwater Linear Actuator vs. Hydraulic Cylinder: Which Is Better?
The comparison hinges on five decision factors specific to underwater environments:
Contamination and Environmental Compliance
In potable water tanks, wastewater facilities, and freshwater reservoirs, hydraulic fluid contamination is not merely an operational problem—it is a regulatory and public health crisis. More than 70% of hydraulic system failures are due to contaminants in the oil, and seal failures underwater release that fluid directly into drinking water supplies.
Electric linear actuators eliminate this risk entirely. Their sealed electric systems contain no hydraulic fluid, making them the default choice for municipal water infrastructure— and the default choice for NSF/ANSI 61 compliance, which sets health-effects requirements for components in contact with drinking water.
Maintenance at Depth
Servicing hydraulic systems deployed underwater presents practical challenges: seal replacements, fluid top-offs, and hose inspections require either diver intervention (with associated confined-space entry risks and WorkSafeBC or equivalent occupational health and safety obligations) or full equipment retrieval.
Electric linear actuators are designed with sealed-for-life internals and minimal wear components, cutting service calls and associated costs. Their brushless motors, integrated encoders, and oil-compensated housings operate for extended periods without intervention.
Precision and Remote Control
Underwater inspection and cleaning robots require precise, programmable motion. Electric linear actuators with integrated 30-bit absolute encoders deliver positioning resolution to microns and support digital communication protocols natively—enabling automated control loops, repeatable positioning sequences, and remote diagnostics.
Hydraulic cylinders require costly servo-hydraulic additions—proportional valves, closed-loop controllers, external position sensors—to approach equivalent control precision, adding thousands of dollars and significant complexity to the system.
Force Requirements
Hydraulic cylinders excel at high-force output. For applications requiring forces exceeding 50,000N to 100,000N, hydraulic systems may be the only practical option.
For the majority of municipal water tank cleaning, ROV manipulation, and valve actuation tasks, electric linear actuators deliver sufficient force with far simpler system architecture. NV Mechanics' units cover a range from 1,000N to 77,500N, addressing most subsea operational demands.
Total Cost of Ownership
Initial equipment cost is only part of the picture. Electric actuators offer measurable advantages across the full ownership lifecycle:
- Eliminate HPU purchase, installation, and maintenance costs
- Reduce labour costs by cutting service intervention frequency
- Prevent contamination-related regulatory fines and remediation expenses
- Enable in-service tank operations, avoiding the waste of millions of gallons of treated potable water and strict dechlorination requirements

Situational Recommendations
Choose an underwater electric linear actuator when:
- Operating in potable or wastewater tanks
- Deploying ROV-based inspection or cleaning systems
- Requiring precise, programmable positioning
- Contamination risk is unacceptable
- Maintenance access is limited or costly
Choose a hydraulic cylinder only when:
- Force requirements exceed available electric actuator capacity
- Operating environment tolerates contamination risk
- System complexity and HPU infrastructure are already in place
- Application is offshore oil and gas with different environmental standards
Real-World Applications: Where Each Technology Is Used
Municipal Water Tank Cleaning: Electric Actuator Success
Consider a municipality operating a large potable water reservoir that previously required complete draining—losing thousands of gallons of treated water—to clean accumulated sediment. Divers entered the confined space manually, triggering strict environmental discharge regulations for chlorinated water. From 2011 to 2018, 1,030 workers died from occupational injuries involving confined spaces — a risk profile that reservoir cleaning repeatedly triggers. The process also took the tank offline for days, disrupting service.
Switching to a remotely operated underwater cleaning robot equipped with pressure-compensated electric linear actuators transforms the operation:
- Keeps the tank online during cleaning, eliminating water loss and discharge logistics
- Removes personnel from confined-space hazards entirely
- Maintains service continuity with no pressure fluctuations or downtime
Field studies document the impact: a Wisconsin water utility study examined a tank uncleaned for 15 years, which contained 28 inches of sediment and bacteria levels of 1300/mL. Following ROV-based underwater cleaning, bacteria and turbidity levels were significantly reduced—all while the tank remained in service.
Offshore Infrastructure: Hydraulic Cylinder Domain
Municipal applications represent one end of the spectrum. At the other end — deepwater oil and gas platforms — the force requirements scale far beyond what electric actuators currently handle. Subsea valve actuation at those depths demands multi-tonne output forces, and hydraulic cylinders remain the primary solution. These installations build HPU integration into the system design from the outset, and the operational complexity is justified by sheer force demands.
That said, hydraulic systems carry environmental liability even offshore. In a 2025 discharge violation case in Massachusetts, 445 gallons of hydraulic fluid leaked into the Connecticut River, resulting in a $25,062 penalty and an Administrative Consent Order. Regulatory tolerance for hydraulic spills is shrinking across jurisdictions.
Matching Actuation Technology to Your Application
The clearest dividing line between these technologies comes down to force requirements and contamination risk. Electric actuators handle the majority of municipal and industrial underwater applications cleanly and safely. Hydraulic systems remain relevant where force demands are genuinely extreme and environmental controls are already in place.
For teams evaluating pressure-compensated actuation for potable water tanks, ROV platforms, or submerged valve control, NV Mechanics Design Ltd. builds electric linear actuators rated to 3,000m–6,000m depth with force outputs from 1,000N to 77,500N — designed specifically for contamination-sensitive and remotely operated environments.
Conclusion
For the majority of submerged automation tasks—particularly in municipal water infrastructure, environmental monitoring, and ROV applications—underwater electric linear actuators are the superior choice. They eliminate contamination risk entirely, reduce maintenance demands, enable precise remote control, and support in-service tank operations that avoid costly downtime and water waste.
Hydraulic cylinders retain a place only in extreme-force, offshore scenarios where system complexity is already accounted for and environmental exposure differs from municipal or freshwater applications. Stricter environmental discharge regulations and the growing maturity of electric ROV platforms are steadily narrowing even that gap.
For municipal engineers, service contractors, and process managers, the choice carries direct consequences for public health compliance, worker safety (eliminating confined-space diver entry), operational continuity, and long-term cost. Before finalizing a specification, weigh not just force output but contamination risk, maintenance burden, and regulatory exposure. Those factors often matter more than raw performance numbers when the system operates inside a drinking water supply or a live industrial process. Manufacturers like NV Mechanics Design Ltd. build pressure-compensated electric linear actuators rated to 3,000m depth specifically to meet these combined demands — without the hydraulic fluid risk.
Frequently Asked Questions
What is the difference between hydraulic and linear actuators?
Hydraulic actuators use pressurized fluid to move a piston, while electric linear actuators convert motor-driven screw rotation into linear motion. Hydraulic cylinders are technically one type of linear actuator, but they differ fundamentally in mechanism, maintenance needs, contamination risk, and suitability for underwater environments where fluid leaks pose serious hazards.
What is the lifespan of a linear actuator?
Electric linear actuator lifespan depends on duty cycle, load rating, and environmental conditions. Pressure-compensated underwater units with sealed housings can deliver tens of thousands of operating hours with minimal maintenance. Hydraulic cylinders wear faster due to seal degradation, fluid contamination, and pressure cycling stress at depth.
Is a ball screw actuator better than a hydraulic cylinder?
For underwater applications requiring precision, remote control, and environmental safety, a ball screw-based electric actuator outperforms a hydraulic cylinder. Hydraulic cylinders hold an advantage only where very high force output is the primary requirement and contamination risk is acceptable, such as offshore oil and gas infrastructure.
What are the four types of linear actuators?
The four main types are electric, hydraulic, pneumatic, and piezoelectric. For underwater deployment, electric and hydraulic are the most relevant — with electric preferred for submerged robotics, municipal water infrastructure, and environmentally sensitive sites.
Can hydraulic cylinders be used underwater?
Yes, hydraulic cylinders can be adapted for underwater use with pressure-balanced designs and specialized seals. However, seal failures risk releasing hydraulic fluid into surrounding water — a serious concern in potable water tanks, freshwater reservoirs, or environmentally regulated environments where contamination carries regulatory and public health consequences.
What makes an actuator suitable for deep water operation?
Deep water suitability requires pressure compensation (typically oil-filled housings that equalize internal and external pressure), corrosion-resistant materials (SST 316 stainless steel or titanium), high-integrity seals against water ingress, and a verified manufacturer depth rating. Quality underwater electric linear actuators are rated to depths such as 3,000m to 6,000m for demanding subsea applications.


