
Introduction
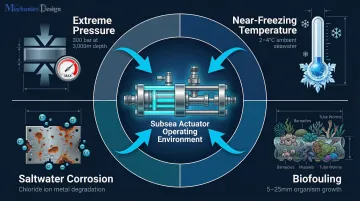
Imagine dropping a piece of industrial equipment into an environment that imposes 300 bar of crushing pressure, near-freezing temperatures, total darkness, and corrosive saltwater—then expecting it to operate flawlessly for months without maintenance. This is the hostile reality facing subsea actuators deployed in extreme underwater environments for inspection, cleaning, and production operations.
Traditional hydraulic actuators have dominated subsea operations for decades, but they're no longer adequate for modern underwater robotics. Their reliance on external hydraulic power units and kilometers of fluid-filled umbilicals creates serious system complexity. The constant risk of environmental damage from oil leaks adds liability that modern applications can no longer accept.
That gap between what hydraulics offer and what extreme environments demand is exactly what this article addresses. It breaks down the four main actuator types used subsea, explains why electric and pressure-compensated alternatives are displacing hydraulics, and outlines the specification criteria that actually matter when selecting a subsea actuator.
TLDR
- Subsea actuators face 300+ bar of pressure at 3,000m depth plus corrosion and biofouling
- Electric actuators eliminate hydraulic infrastructure and environmental spill risk
- Pressure compensation equalizes internal/external pressure, preventing housing crush
- Self-contained designs with integrated electronics reduce failure points
- Depth rating, seal design, and fail-safe behavior are non-negotiable selection criteria
Why Extreme Subsea Environments Demand More From Actuators
The Pressure Challenge
According to NOAA, pressure increases by approximately 1 atmosphere (1 bar) for every 10 meters of water depth. At 3,000 meters—a typical deployment depth for offshore production infrastructure—actuators face roughly 300 atmospheres of external pressure. That's enough force to crush uncompensated components, drive seawater through microscopic seal gaps, and collapse housings not specifically engineered for deep-sea service.
This pressure differential represents the primary engineering challenge. Any actuator with an internal cavity at atmospheric pressure experiences 300 bar of force trying to collapse it from the outside. Standard industrial actuators designed for surface use are not rated for deep-sea service.
Combined Environmental Stressors
Pressure is only one variable. Deep-sea actuators must contend with several simultaneous stressors that compound each other's effects:
Temperature effects: Deep-sea environments typically present temperatures near 2–4°C. Research from BSEE on low-temperature effects shows these conditions significantly impact elastomeric seal hardness, tensile strength, and compression set—requiring qualification under API 6A/ISO 10423 standards.
Biofouling: Marine organisms don't just attach to surfaces—they fundamentally alter mechanical performance. Studies show biofouling thicknesses of 5–25mm can develop within 12 months, increasing drag by up to 400%, clogging mechanical interfaces, and contributing to underfilm corrosion.
Corrosion acceleration: Saltwater attacks exposed metals at a rate that quickly disqualifies materials acceptable for freshwater or surface industrial use. Without corrosion-resistant alloys or appropriate coatings, degradation is rapid and cumulative.
Why Accessibility Compounds Every Challenge
Unlike surface-mounted actuators inspected during routine maintenance windows, subsea actuators on ROVs or fixed infrastructure may operate continuously for months—or years—at depth. Field maintenance is not an option. Retrieval for repair can cost tens of thousands of dollars per day in vessel time alone.
The operational consequences make reliability non-negotiable:
- Any unplanned failure triggers costly vessel mobilization and production downtime
- Self-contained design eliminates the need for topside intervention
- Predictable service life allows scheduled retrieval instead of emergency response
- Pressure compensation and sealed electronics must perform without adjustment for the full deployment cycle
The Four Types of Actuators and Their Subsea Viability
Four primary actuator categories apply to subsea environments:
- Hydraulic — pressurized fluid generates force through a cylinder or motor
- Pneumatic — compressed air drives motion through a piston or rotary mechanism
- Electric — a motor converts electrical energy directly into mechanical motion
- Electromechanical/hybrid — motor-driven transmissions or integrated electro-hydraulic systems combine both approaches
Pneumatic actuators are effectively ruled out for deep subsea use. Gas compressibility under extreme hydrostatic pressure severely degrades control precision and output power, making pneumatic systems unviable beyond shallow depths.
Why Hydraulics Dominated Historically
Hydraulic actuators deliver very high force-to-size ratios, tolerate shock loads well, and carry decades of proven service in oil and gas applications on Christmas trees and manifolds. A compact hydraulic cylinder can generate forces that would require a far larger electric motor to match — which is why hydraulics became the default choice.
Industry standards reflect this maturity. API Spec 17D (Third Edition, October 2021, with addendums in 2022 and 2025) governs subsea hydraulic actuator design. The ISO equivalent, ISO 13628-4:2010, has since been withdrawn, leaving API 17D as the primary reference.
The Shift to Electric Alternatives
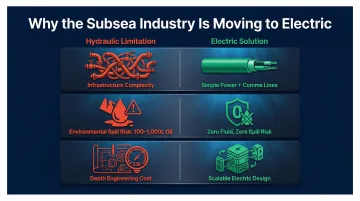
Despite hydraulics' technical advantages, the subsea industry is transitioning to electric and electromechanical alternatives. Three factors drive this shift:
- Infrastructure complexity: Hydraulic systems require topside hydraulic power units (HPUs), control valve manifolds, and kilometers of umbilical lines filled with pressurized fluid—all representing potential failure points
- Environmental liability: Hydraulic reservoirs typically contain 100–1,000 liters of oil, creating significant spill risk if umbilicals or actuators fail
- Depth limitations: Engineering hydraulic systems for 3,000+ meter depths demands cost-prohibitive engineering workarounds
Each of these constraints has a direct answer in electric actuator design — which the following sections examine in detail.
Electric Actuators: Moving Beyond Hydraulic in Subsea Operations
Eliminating Hydraulic Infrastructure
Electric actuators remove the most common failure sources in subsea systems: hydraulic line leaks, valve fouling, and fluid contamination. What remains is electrical power and communication lines — no hydraulic power unit, no control valves, no fluid-filled umbilicals.
This matters most in compact underwater robotics platforms where space and weight are tightly constrained. An ROV using electric actuators eliminates the hydraulic reservoir, pump, accumulator, and valve block—freeing payload capacity for sensors, tools, and batteries.
The Environmental Compliance Argument
Hydraulic fluid spills cause significant marine ecosystem damage. The OSPAR Commission regulates dispersed oil discharges in the North-East Atlantic, while the US EPA's NPDES General Permit strictly prohibits free oil discharge in offshore operations.
Mineral-based hydraulic oils pose risks due to poor biodegradability and high aquatic toxicity. Synthetic esters offer better environmental profiles but still represent a spill risk. Electric actuation eliminates this liability entirely—a growing priority in environmentally sensitive zones including potable water reservoirs and protected waterways.
Performance Capabilities of Modern Electric Subsea Actuators
Brushless DC (BLDC) motors eliminate the primary wear mechanism—brush contact—extending operational life beyond 20,000 hours while achieving 85-93% efficiency compared to 75-80% for brushed motors.
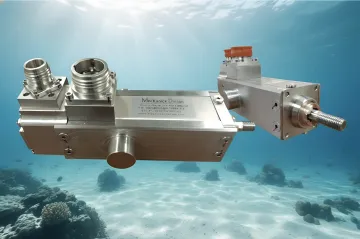
Contactless magnetic encoders provide position data without mechanical contact points that corrode or wear. NV Mechanics Design Ltd.'s subsea actuators integrate a 30-bit absolute encoder directly on the output shaft, retaining position information between power cycles — critical for ROV operations where power interruptions are common.
Housings constructed from SST 316 stainless steel or titanium maintain structural integrity across extended saltwater deployments, built to comply with NORSOK M-001 and ISO 21457 standards for subsea service.
Under IEC 60529, an IP68 rating indicates continuous immersion capability, but depth and duration must be manufacturer-specified — it's not a universal guarantee. Test conditions must exceed IP67 requirements (1 meter for 30 minutes).
Remote Precision Control
Electric actuators support digital communication protocols — CAN bus (CiA 443 CANopen profile for subsea instruments), RS232, or RS485 — providing integrated feedback without additional transducer hardware. Through these interfaces, operators can:
- Command specific positions with exact precision
- Monitor real-time torque and actuator status remotely
- Adjust speed limits, position limits, and torque thresholds on the fly
The Depth Pressure Challenge Remains
All of these performance advantages depend on one prerequisite: the actuator surviving the pressure environment around it. Electric actuators alone don't solve deep-pressure housing requirements. Without compensation, even well-sealed units face differential pressure acting on seals, shaft interfaces, and connector penetrations at extreme depths — which is why pressure compensation design becomes the critical next consideration.
The Critical Role of Pressure Compensation at Extreme Depths
How Pressure Compensation Works
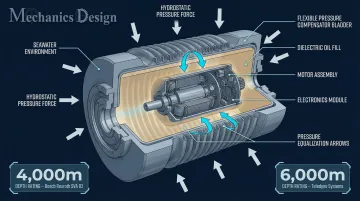
Pressure compensation eliminates the destructive differential pressure that crushes housings and forces water ingress. The solution: fill the actuator's internal cavity with dielectric oil connected to an external compensator or bladder. Internal pressure automatically equalizes with ambient seawater pressure, removing the differential stress.
This approach allows housings to remain lightweight and compact rather than requiring massively thickened pressure vessel walls that would add weight and bulk.
The Compensation Mechanism
A flexible bellows, rolling diaphragm, or bladder connects to the oil-filled housing and absorbs volume changes as the actuator descends. As external pressure increases, the compensator compresses slightly, transmitting that pressure to the internal fluid while maintaining near-zero differential across seals and shaft penetrations.
Commercial systems demonstrate the capability: Bosch Rexroth's SVA R2 electric subsea valve actuator qualifies to 4,000 meters, while Teledyne offers navigation systems rated to 6,000 meters using pressure-compensated housings.
Engineering Compensation as an Integrated System
Pressure compensation must be designed into the complete actuator package—not retrofitted. Every component—seals, connectors, motor housings, and encoder interfaces—must be selected and tested for the full compensation pressure range.
The compensation fluid also matters. MIDEL 7131 synthetic ester is a common choice, offering:
- High fire points (>300°C) for safety compliance
- Excellent thermal conductivity across the operating temperature range
- Biodegradability combined with the dielectric properties required for submerged electronics
Absolute Position Retention Under Power Loss
Subsea systems frequently lose power during ascent, deployment, or ROV operations. Actuators storing absolute encoder position (rather than incremental) resume operation immediately upon power restoration without re-homing cycles.
NV Mechanics Design Ltd.'s subsea actuators address this with a 30-bit absolute encoder retaining position data between power cycles—enabling seamless operation resumption after temporary power interruptions without manual recalibration or position guessing.
Depth Rating Context by Application
Understanding typical operational depths helps match actuator specifications to applications:
| Application | Typical Depth | Requirements |
|---|---|---|
| Municipal water tanks | Tens of meters | Simple IP68 sealing sufficient |
| Industrial cooling intakes | <30 meters | Moderate environmental protection |
| Offshore production infrastructure | 1,900–2,450+ meters | Full oil compensation required |
Thunder Horse operates at 1,920m, Kaombo at 1,950m, and Perdido at 2,450m—all requiring actuators with robust pressure compensation systems rated well beyond 3,000 meters.
Electromechanical and Hybrid Designs: Precision Control in Hostile Conditions
Electromechanical Actuator Architectures
Electromechanical (EM) designs use motors driving precision screw or gear trains to convert rotational energy into controlled linear or rotary motion. Ball screw designs achieve efficiency above 90% through rolling contact rather than sliding friction, offering predictable service life and high mechanical efficiency.
However, both ball screws and alternative transmission designs face identical housing and sealing challenges—requiring pressure compensation or robust waterproof enclosures for deep-sea deployment.
Hybrid Electro-Hydraulic Approach
Hybrid electro-hydraulic actuators (EHAs) combine electric and hydraulic principles in a single package: an electric motor drives an internal hydraulic pump actuating a hydraulic cylinder—all within a sealed, integrated housing.
Bosch Rexroth's SVA R2 exemplifies this approach, delivering the high power density of hydraulic actuation with the clean electrical interface and controllability of electric systems. The design consumes up to 75% less power at peak performance compared to purely electromechanical alternatives while eliminating external hydraulic infrastructure.
This architecture suits high-force subsea valve actuation and work-class ROV gripper applications where electric-only solutions fall short on force output—and where carrying external hydraulic infrastructure isn't practical.
Self-Contained Integration Advantages
Integrating all electronics inside the pressure-compensated housing removes the components most likely to fail in deep-water environments. NV Mechanics Design Ltd. builds this philosophy into every unit—motor drivers, absolute encoders, and RS232/RS422 control circuitry all sealed inside the actuator housing. Key outcomes:
- Eliminates cable penetrations and wet-mate connectors
- Removes the need for external electronics pods
- Reduces ROV integration to a single underwater connector for power and communication
Control Integration for Complex ROV Platforms
Subsea actuators communicating over standard serial protocols (RS232, CAN) can be daisy-chained or individually addressed within multi-axis ROV control systems, simplifying wiring harnesses and reducing umbilical conductor count—a direct reduction in umbilical weight and system cost for long-duration inspection deployments.
What to Look For When Selecting an Alternative Subsea Actuator
Selecting the right actuator comes down to three evaluation categories: technical ratings, control integration, and fail-safe behavior. Work through each before committing to a unit.
Primary Technical Specifications
Verify these core parameters match your application:
- Depth/pressure rating: Match to deployment depth with margin (e.g., 4,000m rating for 3,000m deployments)
- IP rating: IP68 minimum for shallow work; oil-compensated for deeper or extended deployments
- Corrosion resistance: Anodized aluminum, titanium, or SST 316 stainless steel for saltwater; materials must comply with NORSOK M-001
- Operating temperature range: Confirm electronics and mechanical components function across expected thermal conditions (typically 2–40°C for subsea)
Control and Integration Requirements
ROV control architecture varies widely across operators — your actuator needs to fit in without requiring custom middleware or extra hardware boxes. Key requirements to confirm:
- Retains position across power cycles (absolute encoder on output shaft — no re-homing after interruptions)
- Integrates driver electronics inside the housing, eliminating separate control boxes and external wiring
- Communication compatibility: RS232, CAN bus, or Ethernet — confirm protocol matches your ROV's existing architecture
- Supports configurable speed, torque, and position limits for task-specific tuning
Fail-Safe Design Criteria
Because subsea actuators can't be reached during deployment, the fail-state behavior needs to be defined before the unit goes in the water — not discovered during an incident. Confirm:
- Defined fail state: Spring return to closed, position hold, or controlled power-off behavior
- Redundancy strategy: Actuator-level backup (ROV override interface) or system-level redundant control paths
- SIL rating: Safety Integrity Level 3 (SIL 3) compliance per IEC 61508/61511 for critical applications — the threshold required for most valve and pipeline control systems
Frequently Asked Questions
What are the four types of actuators?
The four main types are hydraulic (fluid pressure drives motion), pneumatic (compressed air drives motion), electric (motor converts electrical to mechanical energy), and electromechanical/hybrid (motor-driven transmission or integrated electro-hydraulic systems). Only hydraulic, electric, and hybrid types are viable for subsea environments—pneumatic actuators fail under extreme water pressure.
Which type of actuator is best for high force applications?
Hydraulic and hybrid electro-hydraulic actuators deliver the highest force-to-size ratios and traditionally dominate high-force subsea applications. Modern electric actuators with planetary gear reduction are now competitive for mid-range force requirements (up to ~50,000N), with the added benefit of simpler system architecture.
How deep can electric subsea actuators operate?
Depth capability depends entirely on housing and pressure compensation design, not actuator type alone. Oil-compensated electric actuators achieve ratings to 3,000+ meters, with some systems reaching 6,000 meters. Uncompensated IP68 units are typically limited to shallow inspection depths under 100 meters.
What is pressure compensation in a subsea actuator and why does it matter?
Pressure compensation equalizes internal actuator pressure with ambient seawater pressure using an oil-filled housing connected to a flexible compensator bladder or diaphragm. This eliminates the differential pressure that would otherwise crush seals, force water ingress, or collapse housings at depth. The result is a lightweight design capable of operating at extreme depths without heavy pressure vessels.
Why are hydraulic actuators being replaced in subsea environments?
Three primary drivers are pushing the shift toward electric alternatives:
- Hydraulic oil leak risk creates marine environmental damage and regulatory exposure
- External hydraulic infrastructure (power units, umbilicals, control valves) adds cost and complexity
- Electric actuators now match hydraulic performance with cleaner, simpler architectures and fewer failure points
What control protocols are commonly used for remotely operated subsea actuators?
RS232, RS485, and CAN bus protocols dominate subsea ROV and inspection system actuators, with Ethernet-based protocols emerging for higher-bandwidth applications. Actuators with integrated driver electronics support precise speed, position, and torque control over these standard serial links while reducing external wiring and connector count.


